
Hi, axiiio fans!
First off, apologies for no newsletter last week, we've been very busy writing code and building stuff!
This story actually starts a couple of years ago when we were selecting what type of encoder to use on the axiiio nano motor. We finally settled on a coreless, brushed motor with an integrated encoder that had a plug built into it that enabled simple assembly and replacement of motors if they failed. As you can imagine, we tried all sorts of motors before we settled on this design.
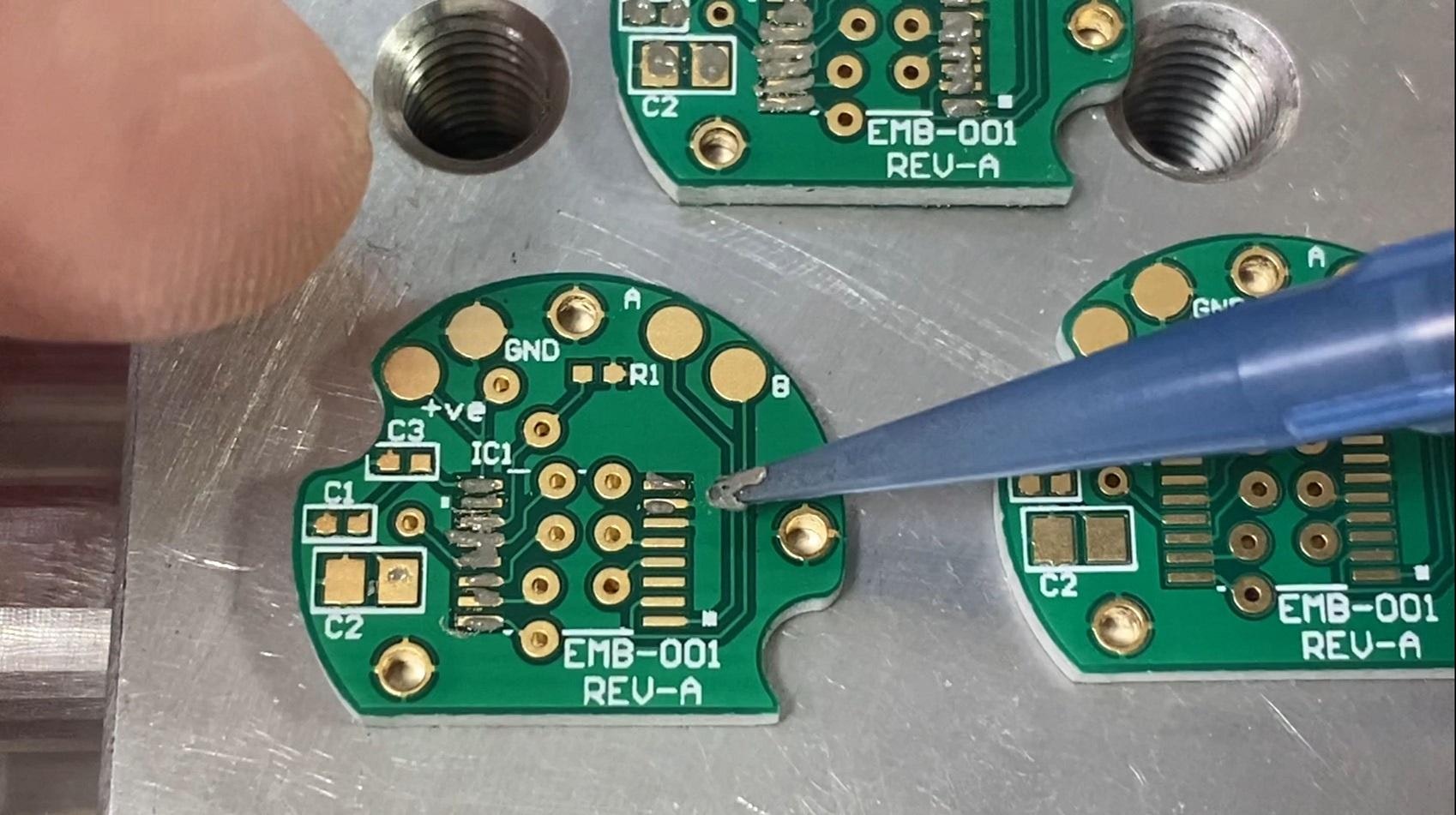
New tiny encoder boards being hand assembled.
One of the motor/encoder combinations we got at the time was never tested in the system because the combination we had chosen worked perfectly well during this initial testing. So it sat in a drawer for about two years, unloved.
Fast forward to today… well, actually, a couple of weeks ago.

New Encoder Boards Cooking on the Skillet
While I was tweaking code to make the motion smoother, I wondered if those motor encoder combinations might work better than the ones that we had. Due to delays in getting some essential components, I figured I had a bit of time to try. I wrote some code, did a quick test to make sure it was working and installed that motor on a slider with our carbon fibre tilt pan head.

New Prototype Encoder Components
The first thing you do with a new reconfiguration is calibrate it. So I hit the calibrate button and waited for the software to perform its magic.
Now the calibration process is quite noisy because all the gains in the system are turned up while it works out what the best settings are. Because I've done this literally thousands of times, I know exactly what it sounds like, or in this case, doesn't sound like.
I was very disappointed when the noise stopped because that probably meant I'd nerfed the code up. So, I turned around and started heading back to the desk to have a look at the code to see what I'd done. I'm looking at the rig, and the slider is still moving but it's completely silent, I can't hear it at all.
It didn't sink in for a few seconds, but the new motor/encoder combination had made the rig much quieter!
After a bit more testing I realised that it also made the motion a lot smoother, in fact when I put a really long lens on the test camera, I got usable footage!
Now to be fair, I knew there would be some gains with this motor encoder combination. I had decided not to use it or even test it all those years ago because installing it in the system would be very difficult and require a whole bunch of reengineering. I had no idea that the gains would be as significant as they've turned out to be! So, we've embarked on reengineering the encoders in the system to take full advantage of the noise and smoothness gains.
Unfortunately, it means we have to modify our entire stock of motor/encoder combinations for the new design, which will delay us a little bit but we think it's very important to make this the best possible product.
Stay tuned for more updates on our encoder testing adventure!
Thanks
That's all for this one. Stay creative and make sure to get in touch if you have any questions, want more details, want to discuss your motion projects, or anything. Just email equiries@axiiio.com.